Rope::Rope(Vector2D start, Vector2D end, int num_nodes, float node_mass, float k, vector<int> pinned_nodes) { // TODO (Part 1): Create a rope starting at `start`, ending at `end`, and containing `num_nodes` nodes.
// Comment-in this part when you implement the constructor // for (auto &i : pinned_nodes) { // masses[i]->pinned = true; // }
for (int i = 0; i < num_nodes; i++) { Vector2D pos = start + (end - start) * ((double)i / ((double)num_nodes - 1.0)); masses.push_back(newMass(pos, node_mass, false));
}
for (int i = 0; i < num_nodes - 1; i++) { springs.push_back(newSpring(masses[i], masses[i+1], k)); }
for (auto &i : pinned_nodes) { masses[i]->pinned = true; }
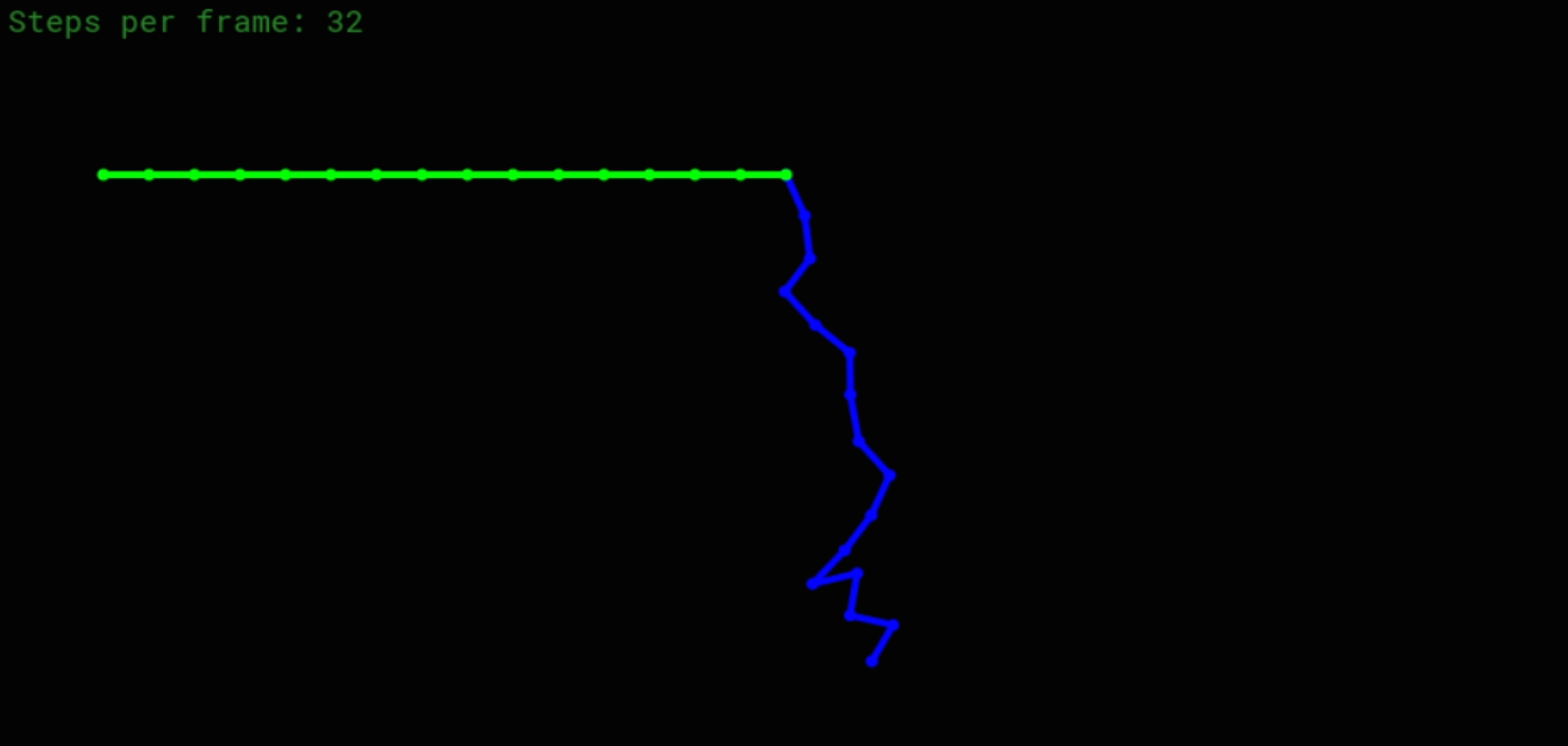
for (auto &s : springs) { // TODO (Part 2): Use Hooke's law to calculate the force on a node float l = (s->m1->position - s->m2->position).norm(); s->m1->forces += -(s->k) * (s->m1->position - s->m2->position) / l * (l - s->rest_length); s->m2->forces += -(s->k) * (s->m2->position - s->m1->position) / l * (l - s->rest_length); }
for (auto &m : masses) { if (!m->pinned) { // TODO (Part 2): Add the force due to gravity, then compute the new velocity and position Vector2D a = m->forces / m->mass + gravity; m->velocity += a * delta_t; m->position += m->velocity * delta_t; }
// Reset all forces on each mass m->forces = Vector2D(0, 0); }
voidRope::simulateVerlet(floatdelta_t, Vector2D gravity) { for (auto &s : springs) { // TODO (Part 3): Simulate one timestep of the rope using explicit Verlet (solving constraints) float l = (s->m1->position - s->m2->position).norm(); s->m1->forces += -(s->k) * (s->m1->position - s->m2->position) / l * (l - s->rest_length); s->m2->forces += -(s->k) * (s->m2->position - s->m1->position) / l * (l - s->rest_length);
}
for (auto &m : masses) { if (!m->pinned) { Vector2D temp_position = m->position; // TODO (Part 3.1): Set the new position of the rope mass Vector2D a = m->forces / m->mass + gravity; m->position = temp_position + (temp_position - m->last_position) + a * delta_t * delta_t; m->last_position = temp_position; } // Reset all forces on each mass m->forces = Vector2D(0, 0); } }
voidRope::simulateVerlet(floatdelta_t, Vector2D gravity) { for (auto &s : springs) { // TODO (Part 3): Simulate one timestep of the rope using explicit Verlet (solving constraints) float l = (s->m1->position - s->m2->position).norm(); s->m1->forces += -(s->k) * (s->m1->position - s->m2->position) / l * (l - s->rest_length); s->m2->forces += -(s->k) * (s->m2->position - s->m1->position) / l * (l - s->rest_length);
}
for (auto &m : masses) { if (!m->pinned) { Vector2D temp_position = m->position; // TODO (Part 3.1): Set the new position of the rope mass //Vector2D a = m->forces / m->mass + gravity; //m->position = temp_position + (temp_position - m->last_position) + a * delta_t * delta_t; //m->last_position = temp_position;
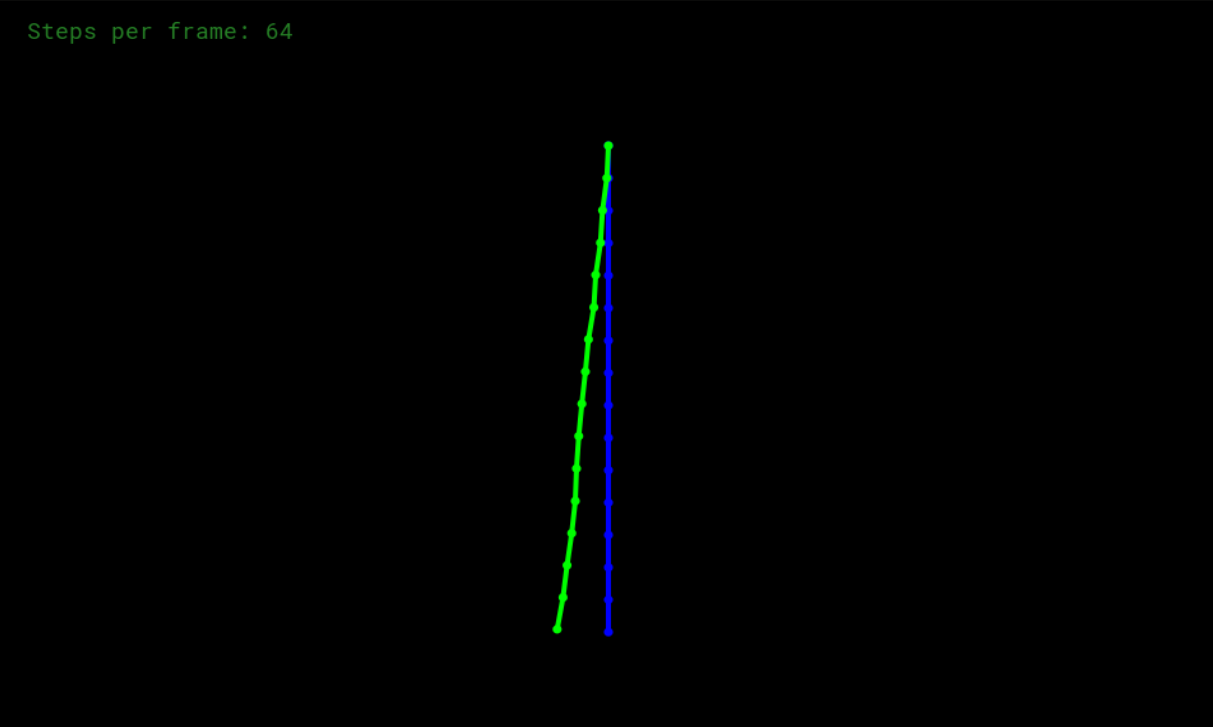
// TODO (Part 4): Add global Verlet damping Vector2D a = m->forces / m->mass + gravity; float damping_factor = 0.00005; m->position = temp_position + (1 - damping_factor) * (temp_position - m->last_position) + a * delta_t * delta_t; m->last_position = temp_position;
} // Reset all forces on each mass m->forces = Vector2D(0, 0); } }
voidRope::simulateEuler(floatdelta_t, Vector2D gravity) { for (auto &s : springs) { // TODO (Part 2): Use Hooke's law to calculate the force on a node float l = (s->m1->position - s->m2->position).norm(); s->m1->forces += -(s->k) * (s->m1->position - s->m2->position) / l * (l - s->rest_length); s->m2->forces += -(s->k) * (s->m2->position - s->m1->position) / l * (l - s->rest_length); }
for (auto &m : masses) { if (!m->pinned) { // TODO (Part 2): Add the force due to gravity, then compute the new velocity and position //Vector2D a = m->forces / m->mass + gravity; //m->velocity += a * delta_t; //m->position += m->velocity * delta_t;
// TODO (Part 2): Add global damping float kd = 0.05; Vector2D a = m->forces / m->mass + gravity - kd * m->velocity / m->mass; m->velocity += a * delta_t; m->position += m->velocity * delta_t; }
// Reset all forces on each mass m->forces = Vector2D(0, 0); } }